link to the FIRST website
|
link to the web page of FRC program
|
History of 2626
The 2015-16 season will be our 9th participation in the FIRST project. Everything started in 2006-2007, when Mr. Laurent Beaudoin from Bombardier came to the Séminaire de Sherbrooke to invite us to participate at a robotics competition that is very popular in the United States and in Anglophone Canada. This competition was FRC - FIRST Robotics Competition. A small group of students and teachers went to Boston to observe a regional tournament. We were so excited by the project and the opportunity that we signed up to be FRC's 2626th team, Evolution 2626.
Every year, we receive a new challenge, and have six weeks to build a new robot to get as far as we can in the tournament bracket. We team up with two other teams every match in an Alliance to get as many points as possible. Here is a summary of the challenges Evolution 2626 has tackled in previous years.
Every year, we receive a new challenge, and have six weeks to build a new robot to get as far as we can in the tournament bracket. We team up with two other teams every match in an Alliance to get as many points as possible. Here is a summary of the challenges Evolution 2626 has tackled in previous years.
|
2016: Stronghold
This year's challenge is complex. Teams can breach opponents' defenses to cross into the enemy's courtyard, from which they can throw boulders into goals to weaken the opponent's tower. Breaching 4 of the 5 defenses and capturing the enemy's tower is extremely advantageous. Teams must decide if they want to specialize in one section of the game or try to cover all facets. Watch the video of the challenge 2015: Recycle Rush
The challenge of this year is to pick up and stack totes on scoring platforms, put pool noodles inside recycling containers, and put containers on top of scoring stacks of totes. There is also a coopetition aspect of the game where both alliances of teams can pool their totes and stack them on a step dividing the field to each gain 20 points. Watch the video of the challenge 2014: Aerial Assist
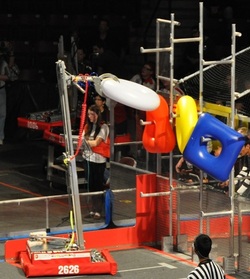
The challenge of this year is to make passes between the robots of our alliance with an exercise ball. The more passes (assits) we make, the more points we have. On each extremity, we have a goal, some give 10 points and some give 1 points (in the lower corners). The first assist does not give points but the second and the third give 10 and 30 points. In the center of the area there is a beam about 6 feet off the ground. If an assit passes over it, 10 points are given to our aliance and if a robot catches the ball, we have an other 10 points. All these points are attributed only if we score a goal with the ball. Watch the video of the challenge 2013: Ultimate Ascent
This timem, the robot ahve to play Frisbee. For scoring points, the robots launch frisbee in the goals placed at each end of the field or in the goal at the top of the pyramid. The points are given this way : 3 points for the highest goal of the field, 2 points for the middle goal, 1 point for the lowest goal and 5 points for the goal on the top of the pyramid. Moreover, if the frisbees get in the goals during de autonomous period, the points will be doubled. The field is seperate in two and in each part, there is a pyramid with three level. Near the end of the match, at 30 seconds, a robot can climb the pyramid. The climbing points are given in fonction of the level the robot reached. 10 points are given for the first level, 20 points for the second and 30 points for the the highest and final level. Watch the video of the challenge 2012 : Rebound Rumble
This year, the robot has to play basketball. To score points, robots must shoot basketballs in one of the four baskets located at the end of the field. The baskets are divided within three differents heights: one basket is placed at 28 in. high, two are placed at 56 in. high and the top basket is at 98 in. from the floor. Points are distributed as following: 3 points for scoring in the top basket, 2 points for scoring in the middle ones and one point for scoring in the bottom basket. 3 points are added to each ball entering the basket in the autonomous mode, in which the robot isn’t piloted by a player and must hence move on it’s own. This year, an important modification has been made to the autonomous mode: teams have the possibility to use a Xbox Kinect to control their robot. Allthough, only one team per alliance (composed by 3 teams) will have the opportunity to lead their robot with the Kinect. The playing surface is divided in two by a 4 in. tall by 6 in. wide metal bar called “the barrier”. In order to cross the barrier, three bridges had been installed. One red bridge which can be used by the red alliance, one blue bridge which can be used by the blue alliance and one white bridge available for both alliances. The bridges are placed 12 in. above the ground. Robots may set the bridge at an angle in order to pass over it. The robots can also cross the field by passing over the barrier. In the last 15 seconds of the match, the robots have the chance to earn extra points if they manage to keep their balance on a bridge (of their alliance). Multiple robots may balance on one unique bridge giving even more extra points for the alliance who succeed such a challenge. Points of cooperation are given if two robots coming from opposite alliance balance on the white bridge. Watch the video of the challenge 2011 : Logomotion
The robot had to take tubes which form the logo of FIRST (a triangle, a circle and a square) and hang them on posts disposed at three different heights. On the autnomous mode, robots had to place a tube on a post. When a form was attached to the third level, the team won three points. When a tube was attached to the second level, the team won two points and when they hang it on the first level, the team won only one point. When an alliance completed a FIRST logo in the right order (triangle-circle-square), it doubled the points of each tube forming the FIRST logo. The points were double again if one of the tubes was placed in the autonomous mode. At the end of the game, robots were allowed to earn bonus points by deploying a minibot on a tower. The first minibot to reach the top of the tower made his owner win 30 points if 1st, 20 points if 2nd, 15 points if third, and the last minibot had a 10 points bonus. Watch the video of the challenge 2010 : Breakaway
The robot had to kick soccer balls into one of the two goals which were placed at each corner of the field. The playing area was divided into three parts by a bar that robots could either pass below (in 3 holes designed for this purpose) or beyond the bars itself. The robots had to launch balls and were not allowed to move with the balls. They also had to protect their goals the other team, who were each composed of three robots. If, crossing the hump, a robot is reversed, another robot of the team could go back. At the end of the match, the robots could go hang on structures located in the media moguls. Points were given as follows: 1 point when a ball entered the goal, 2 points when the robot managed to hang on the structure, and 3 points when a robot on robot already hung suspended. Watch the video of the challenge 2009 : Lunacy
This year the competition was played on a slippery surface, representing the Moon. The robots had to have wheels that adhered to the surface. While applying the least possible pressure. At the back of each robot, a trailer was attached. The goal was to launch different type of ball (Empty Cell, Cell and Super Moon Rock) in the trailer of a robot of the opposing team. Participants could also throw balls into trailers. Early in the game, the robot starts with 7 Moon Rock in their possession in a basket located on the robot. Robots could pick up the balls that were not entered into the trailer and send them to their teammates. They could also be a tool to equip a team member and place a balloon over the robot to go put it in a trailer side. During the game, the balls additional types Moon and Empty Cell Rock could be exchanged against bullets Super Cell. During the last 20 seconds of the game, team members and / or robots could launch these balls into trailers to earn extra points. Bullets and Moon Rock Empty Cell worth 2 points each and Super Cell balls were worth 15 points each. Watch the video of the challenge 2008 : Overdrive
The robots had to turn most of the playing surface as possible by moving large balls. The robots started on the back wall (the alliance of all red and blue alliance of the whole) of the game playing surface was divided in half lengthwise by a bridge, called Overpass, six feet and a half high. Each alliance had two balloons were positioned randomly at the beginning of each game. The robots must be built strong enough to be able to withstand the drop ball possible. During hybrid mode, if the robot was able to move a ball, are harvested alliance bonus points. When the pilot took control, they had to move the ball around the playing surface, or by pushing them or taking them. Every ball that was passed under the bridge gave 2 points. By cons, each ball pass over the bridge gave 8 points. 20 bonus points could be earned if at the end of the match, the robot managed to put the ball on top of the bridge and remained in position, because the other robots were able to drop it. Watch the video of the challenge |


2015: Recycle Rush
Results of the Festival de Robotique FRC de Montréal Régional:


Rank2013 : Ultimate Ascent
Results of the Festival de Robotique FRC de Montréal Régional:w

2012 : Rebound Rumble
Results of the Greater Toronto East Regional:
Results of the Festival de Robotique FRC à Montréal Regional:



2010 : Breakaway
Results of the Greater Toronto Regional:


2009 : Lunacy
Results of the Greater Toronto Regional:


2008 : Overdrive
Results of the Greater Toronto Regional:
|